- Joined
- Oct 15, 2020
- Messages
- 208
Due to Precision Matthew's fame, my mill comes Monday, but my DRO won't be here till Thanksgiving or so - they have stocking and supply issues 
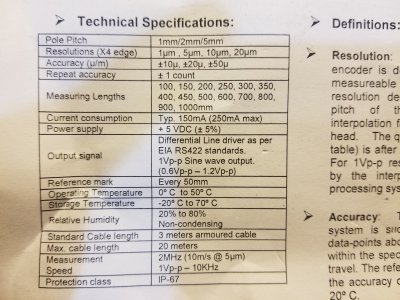
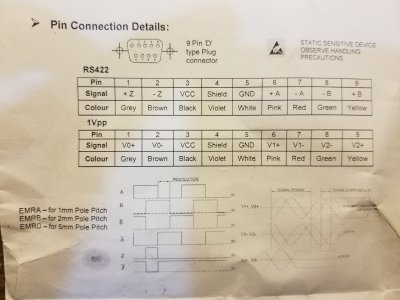
The documentation for the scale says: "Pitch is 0.02mm; EPS is 5v; Output 2 Channels of TTL square wave with a phase difference of 90 (with zero position signal); current is 50mA". My invoice from PM says "Upgraded DRO (glass to magnetic)"
----lots of interpolation going on here (the pun is intentional!)
I am unfamiliar with the programming of other microcontrollers - do they have a dedicated IDE and can they use C like the Arduino? That's not a good question - low level
This other microcontroller seems right as you describe it, but I'll need libraries for the LCD, Keypad, and Stepper-controller, then I'll have to puzzle out it's program logic. If this alternative brain has a fair following, or uses Arduino libraries, it should be pretty straightforward.
I've already got a menu tree in mind, so I think I can go ahead and write some pseudo-code with variables and library callouts - but I've got to pick hardware before I can actually write the code.
I will look to find Clough42's ELS - have you a link to his goodies?
The documentation for the scale says: "Pitch is 0.02mm; EPS is 5v; Output 2 Channels of TTL square wave with a phase difference of 90 (with zero position signal); current is 50mA". My invoice from PM says "Upgraded DRO (glass to magnetic)"
----lots of interpolation going on here (the pun is intentional!)
I am unfamiliar with the programming of other microcontrollers - do they have a dedicated IDE and can they use C like the Arduino? That's not a good question - low level
This other microcontroller seems right as you describe it, but I'll need libraries for the LCD, Keypad, and Stepper-controller, then I'll have to puzzle out it's program logic. If this alternative brain has a fair following, or uses Arduino libraries, it should be pretty straightforward.
I've already got a menu tree in mind, so I think I can go ahead and write some pseudo-code with variables and library callouts - but I've got to pick hardware before I can actually write the code.
I will look to find Clough42's ELS - have you a link to his goodies?