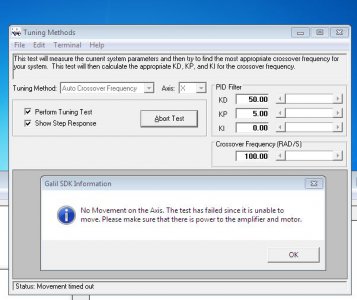
Jim has been invaluable with setup on the DMM servo system. lately, he exchanged several emails with the vendor on my behalf, then spent a day testing DMM settings and tuning a servo. His letter, below, is super informative for anyone considering this product on a +/- 10 volt analog control.
OK, I completed my testing.
The goal is two fold, 1) Maximize performance and 2) determine what effect the various DMM parameters have on performance.
Conditions:
DYN4
1.8KW
240V 3Ph input
Torque Mode
Analog Input
Galil DMC-1846 controller
Only tested the ‘’D’’ axis, Live Tooling. This axis can run free without limitation.
Reasonably low mass system.
I tried making minor adjustments to the drive parameters to gauge the effect on performance with out changing my Galil parameters, and noted no changes. So being of the school of; If a small change does nothing then make a big change and see what happens.
Starting Parameters:
DMM Parameters
Main Gain 127
Speed Gain 127
Integration Gain 1
Torque Filter 127
Max Speed 65
Max Acceleration 127
On Position Range 127
GEAR_NUM 4096
LINE_NUM 2000
Driver Status Servo OnPos
Driver ID 0
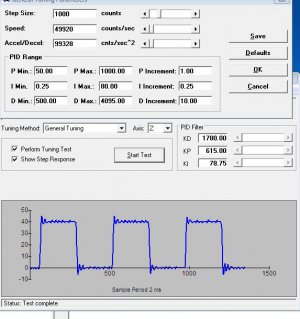
Then played around with the Galil parameters while watching the following error and stopped position error. I ran these tests in incremental mode using the IP (increment position) command turning the motor about 20 revolutions per increment.
Galil Parameters
SPD=30000
KPD=20
KID=0.0000
KDD=60
ACD=199680
DCD=199680
Using the above settings, the following error was in the range of ~100 pulses, and the stopped position error was ~40
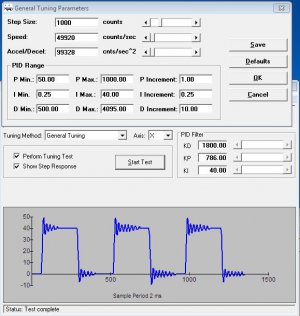
So I adjusted the Galil parameters until the system was stable and very stiff, making changes as I was incrementing the axis.
These are the parameters I ended with. Ignore the speed since it is of course variable, but needed to make sure that the performance was stable at higher speeds.
Ending parameters:
SPD=120000
KPD=120
KID=0.0049
KDD=160
ACD=499712
DCD=499712
Using the above settings, the following error was in the range of -20 pulses, just about perfect, and the stopped position error was +/- 1, 0 is perfect.
Once I was happy with the system performance, I started testing each DMM parameter one at a time, since I started at 127 on all but the Integration Gain (1), I set each of the other parameters to 1, one at a time, and checked the result.
The final test DMM settings were:
Main Gain 1
Speed Gain 1
Integration Gain 1
Torque Filter Constant 1
Max Speed 1
Max Acceleration 1
On Position Range 1
GEAR_NUM 16384
LINE_NUM 2000
Driver Status Servo OnPos
Driver ID 0
There was no difference in the performance with changes to any setting, including Gear Number. I tried setting the Gear Number at 500 and at 16384, no difference noted.
So now we know how to make this system run with a Galil controller in Torque Mode, and how the DMM drive reacts to different settings. The bottom line seems to be that putting the DYN4 into Analog Torque mode makes it a simple transconductance amplifier, in other words, turns it into a complete zombie with no control at all. All of the control is done in the Galil.
Note: The Galil settings above are specific to the dynamics of my Live Tooling drive, and will be different for other controllers and systems. The PID parameters would be way high for older generation (Optima) Galil controllers.
Jim Dawson
James Dawson Controls LLC



") That makes more sense.
That makes more sense.