- Joined
- Feb 8, 2014
- Messages
- 11,144
Ahhh, I found the WSDK software, that is a really old software. It runs on Win7? It does have a terminal built in so you can use that, never used it before, but is should be able to give you all of the same data that any of the other terminal software give you.
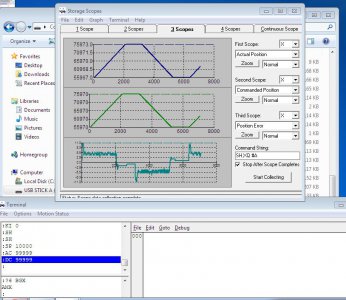
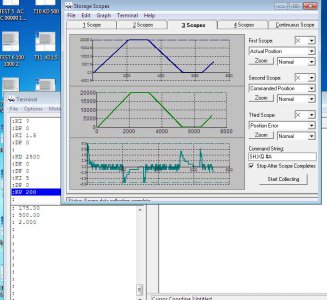
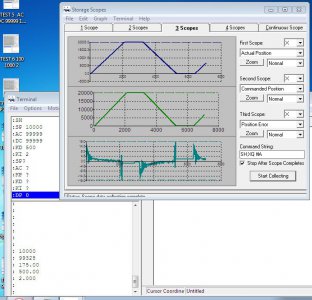
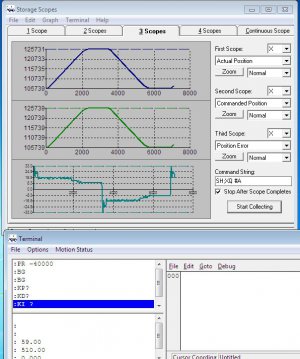
In the case of a mill I just write a little program to continuously move the table back & forth (see a few posts back) while I'm manually changing parameters from the keyboard. Watching mainly _TE to see what it's doing. In a perfect world, _TE should always read 0, but the world is not perfect. You always want a small amount of following error, never lead error, for a stable system, with no overshoot. Feel the machine while testing, that will tell you a lot about the way it's running.
The ''P'' tightens the system, the ''I'' reduces the following error, and the ''D'' smooths it all out by damping the rate of change. Normally I start with ''P'' at 6, ''I'' at 0, and ''D'' at 24 (4xP), then just keep bumping ''P'' up until the system gets tight. Too much ''P'' and the system will go unstable and oscillate, same with too much ''I'', too much ''I'' causes overshoot also. Add ''D'' as needed, ''D'' should always be greater than ''P''.
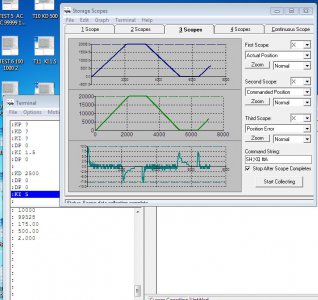
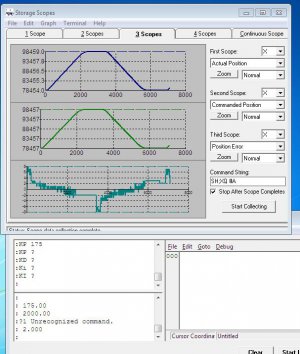
In the case of a mill I just write a little program to continuously move the table back & forth (see a few posts back) while I'm manually changing parameters from the keyboard. Watching mainly _TE to see what it's doing. In a perfect world, _TE should always read 0, but the world is not perfect. You always want a small amount of following error, never lead error, for a stable system, with no overshoot. Feel the machine while testing, that will tell you a lot about the way it's running.
The ''P'' tightens the system, the ''I'' reduces the following error, and the ''D'' smooths it all out by damping the rate of change. Normally I start with ''P'' at 6, ''I'' at 0, and ''D'' at 24 (4xP), then just keep bumping ''P'' up until the system gets tight. Too much ''P'' and the system will go unstable and oscillate, same with too much ''I'', too much ''I'' causes overshoot also. Add ''D'' as needed, ''D'' should always be greater than ''P''.
Last edited:
")