- Joined
- Jan 26, 2012
- Messages
- 87
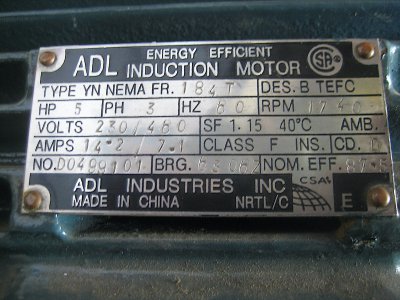
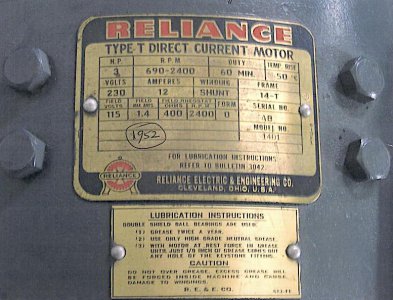
I've been reading up all the info I can here about converting my Monarch 10EE DC drive system to 3-phase AC with VFD control. The 3 hp Reliance DC motor works fine but my custom-built DC controller is becoming a real headache and impossible to troubleshoot. I looked into a new DC controller but found this was very expensive and since I already have a 5hp 3-phase AC induction motor I will buy a 10 hp rated (2x factor) VFD to power it since the input is single phase. At this point I'm not planning to adapt it to my gearbox so will start out at least driving spindle directly from the motor. If I find down the road it doesn't have enough low end torque for threading I can always adapt the backgear to add back in.
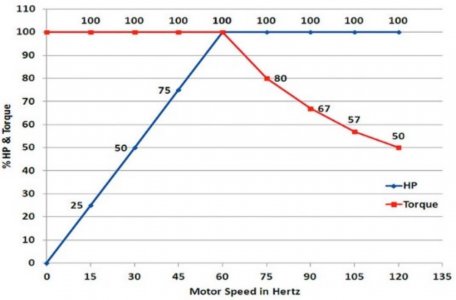
The 3-phase motor I'm planning to use is 1740 rpm. Looking over Karl_T's 10hp direct-drive install, his motor is about the same rpm at 60 hz as mine, and he has put a 2.3" OD motor pulley belted to the 7" spindle pulley for a 2.5 ratio. I'm trying to understand how you get the spindle up to 2500 rpm and the only way I can see to do that is to overspeed the motor by feeding it 3x the hz. Is this correct?
The 2nd question I have is to determine what brake resistor I might need since the 2 resistors on the lathe now are not likely the right size. I understand you can set the VFD accell/decell times but an external brake seems to be a good idea on a lathe where you want it to stop quickly. Is there a simple calculation to determine this? Bill
The 3-phase motor I'm planning to use is 1740 rpm. Looking over Karl_T's 10hp direct-drive install, his motor is about the same rpm at 60 hz as mine, and he has put a 2.3" OD motor pulley belted to the 7" spindle pulley for a 2.5 ratio. I'm trying to understand how you get the spindle up to 2500 rpm and the only way I can see to do that is to overspeed the motor by feeding it 3x the hz. Is this correct?
The 2nd question I have is to determine what brake resistor I might need since the 2 resistors on the lathe now are not likely the right size. I understand you can set the VFD accell/decell times but an external brake seems to be a good idea on a lathe where you want it to stop quickly. Is there a simple calculation to determine this? Bill